
Project Specification
- Project Type: Academic
- Project Mode: Independent
- Project Status: Complete
- Project Duration: 3 Months
- Project Involvement
- Developed the robot controller
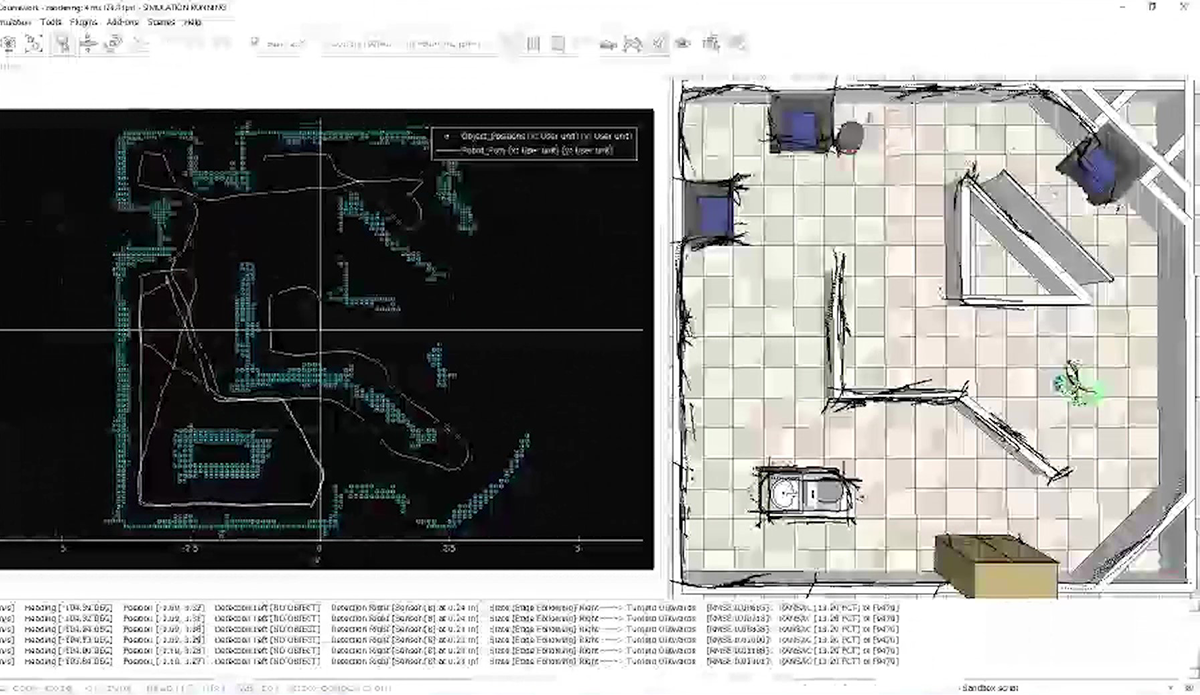
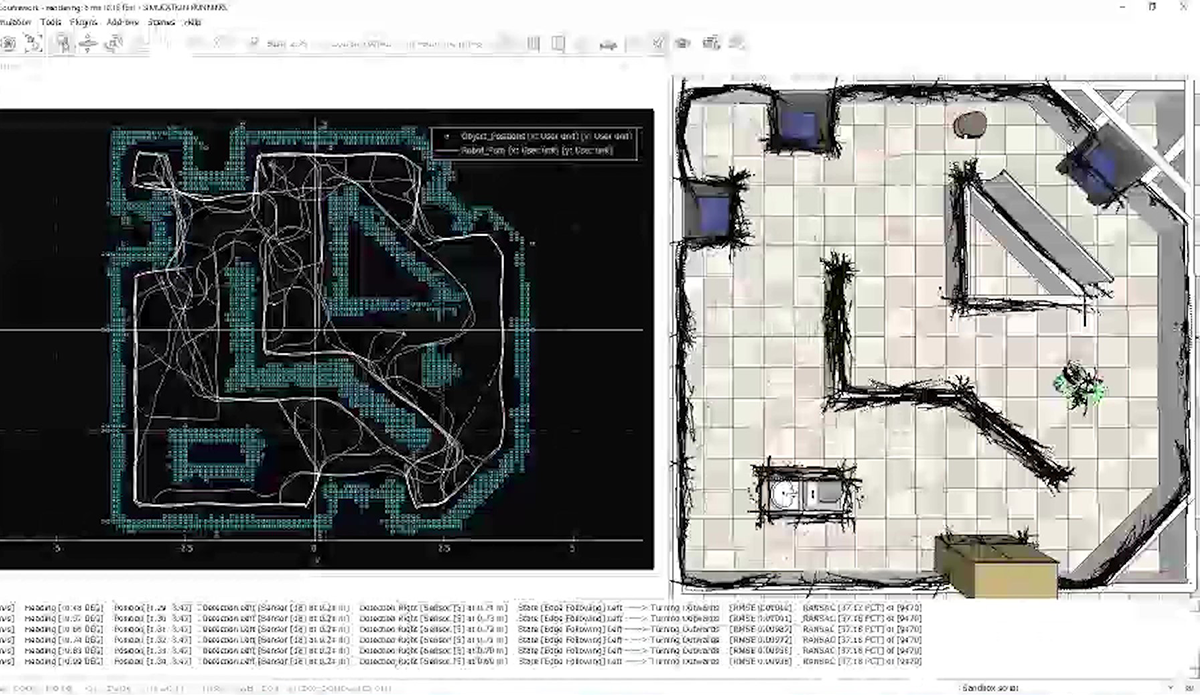
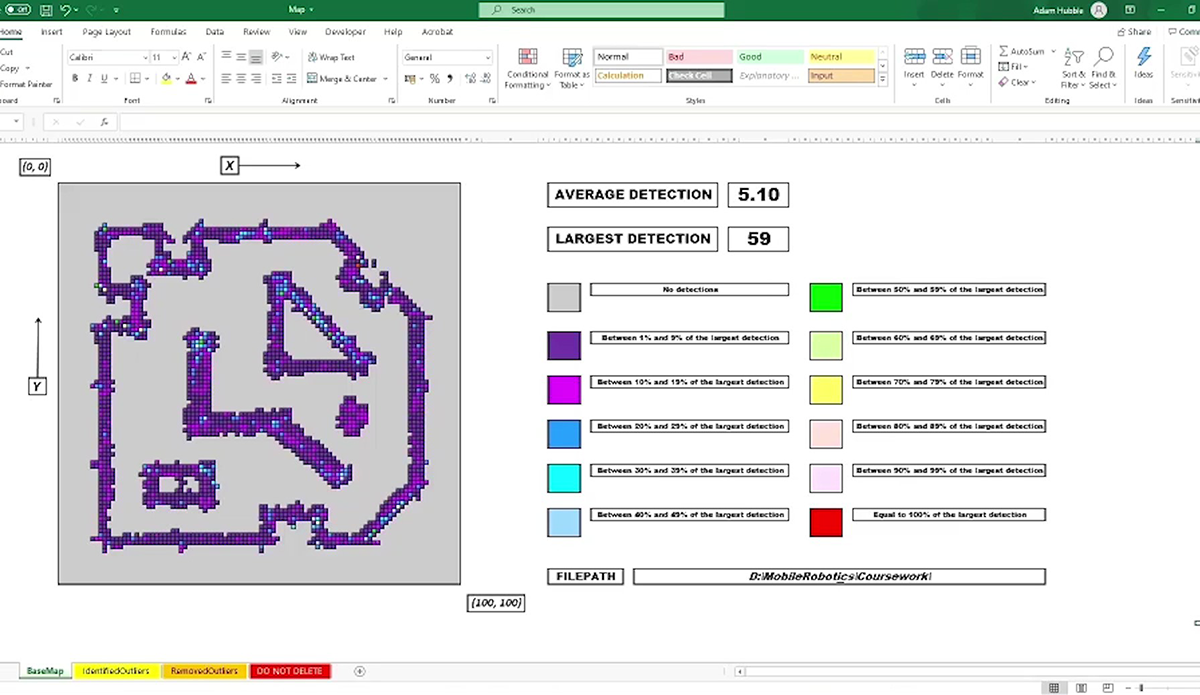
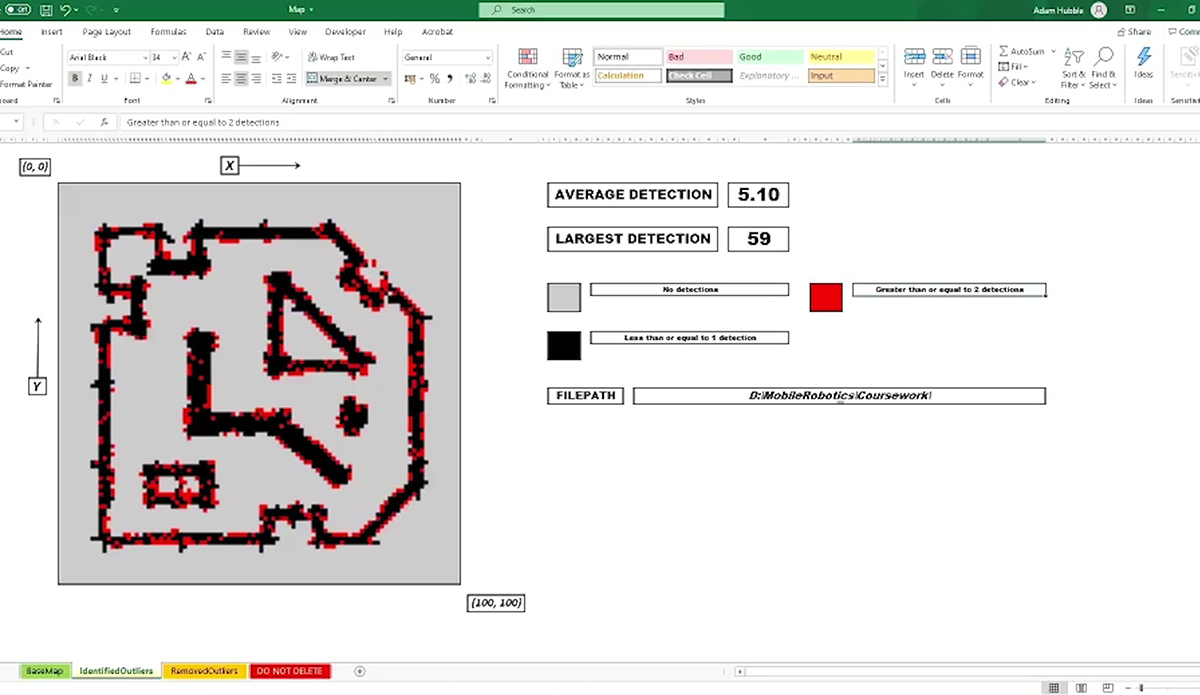
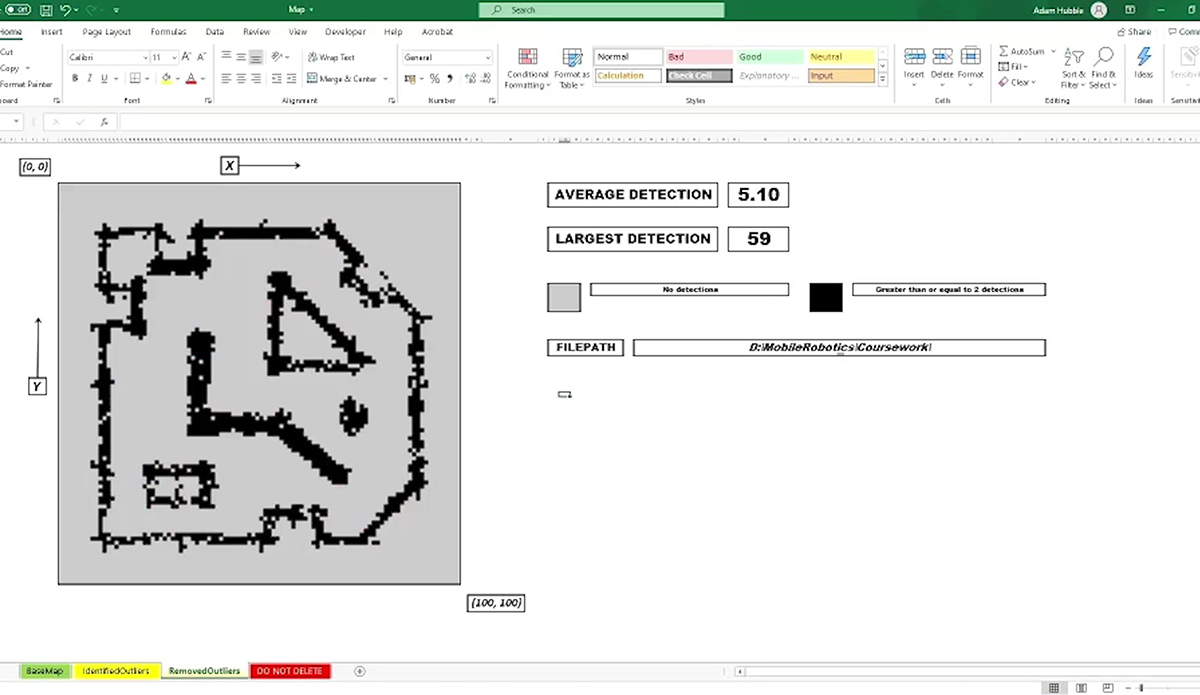
- Implemented environment charting
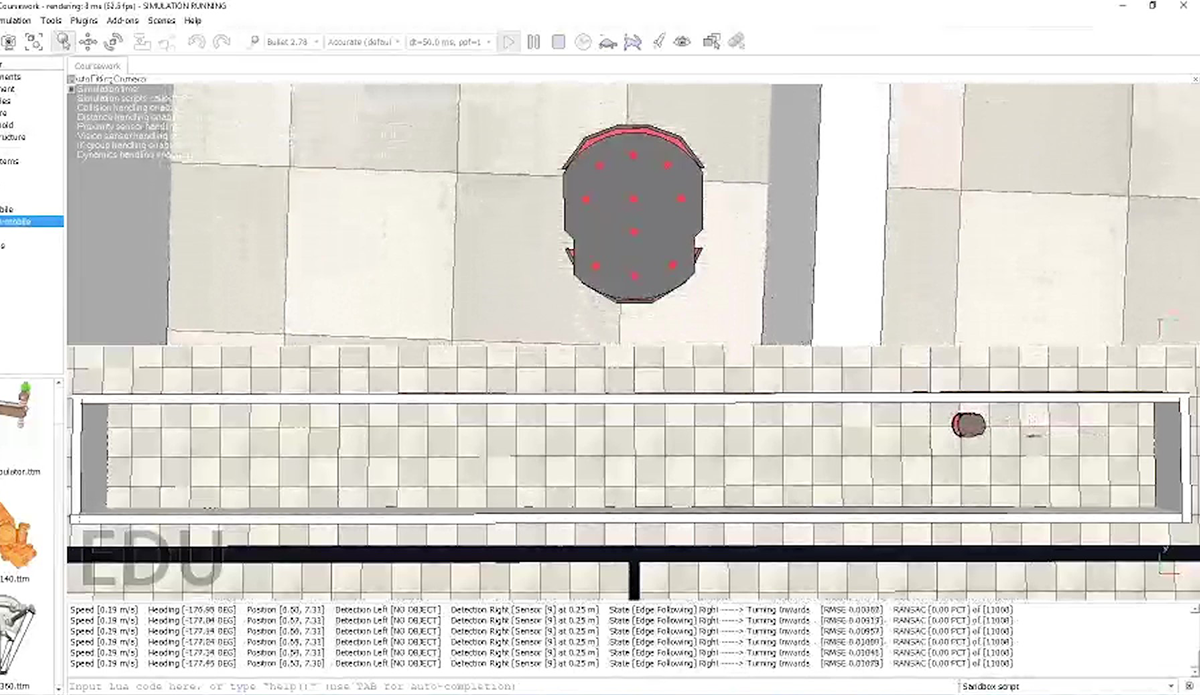
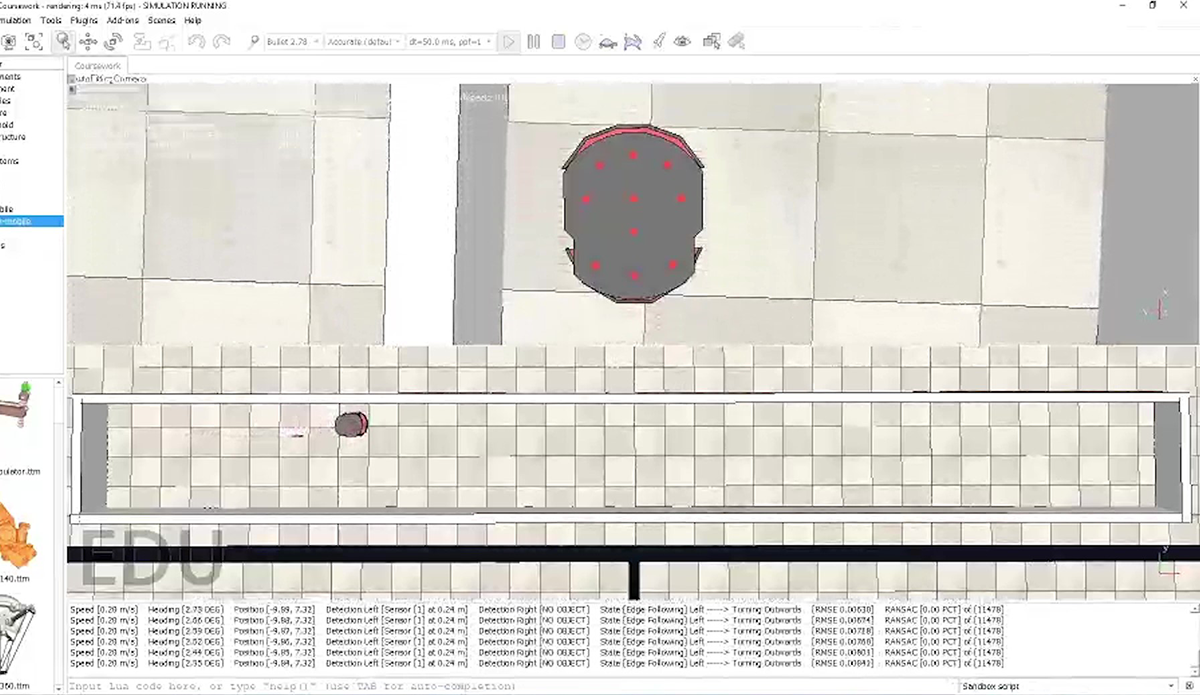
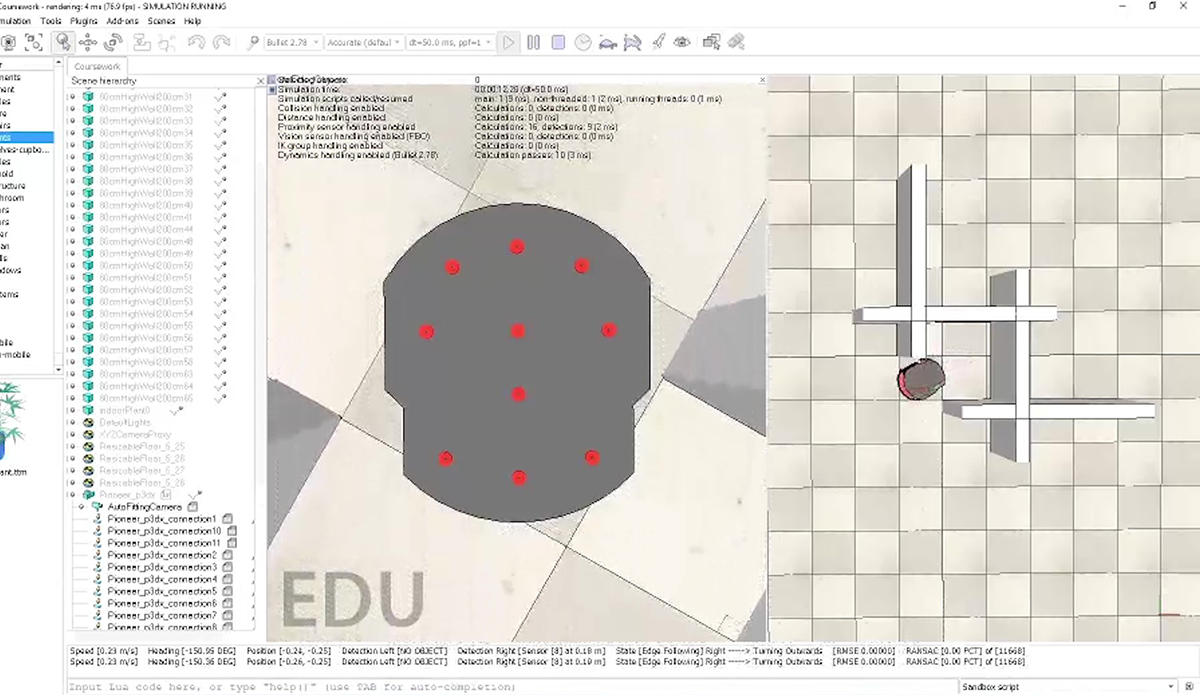
- Engineered edge following behaviours
- Developed random traversal behaviours
- Integrated obstacle avoidance behaviours
- Software Applications
- CoppeliaSim
- Microsoft Excel
- Microsoft Visual Studio
- Supported Platforms
- Windows
- Download: GitHub
- Documentation: .pdf .docx
Synopsis
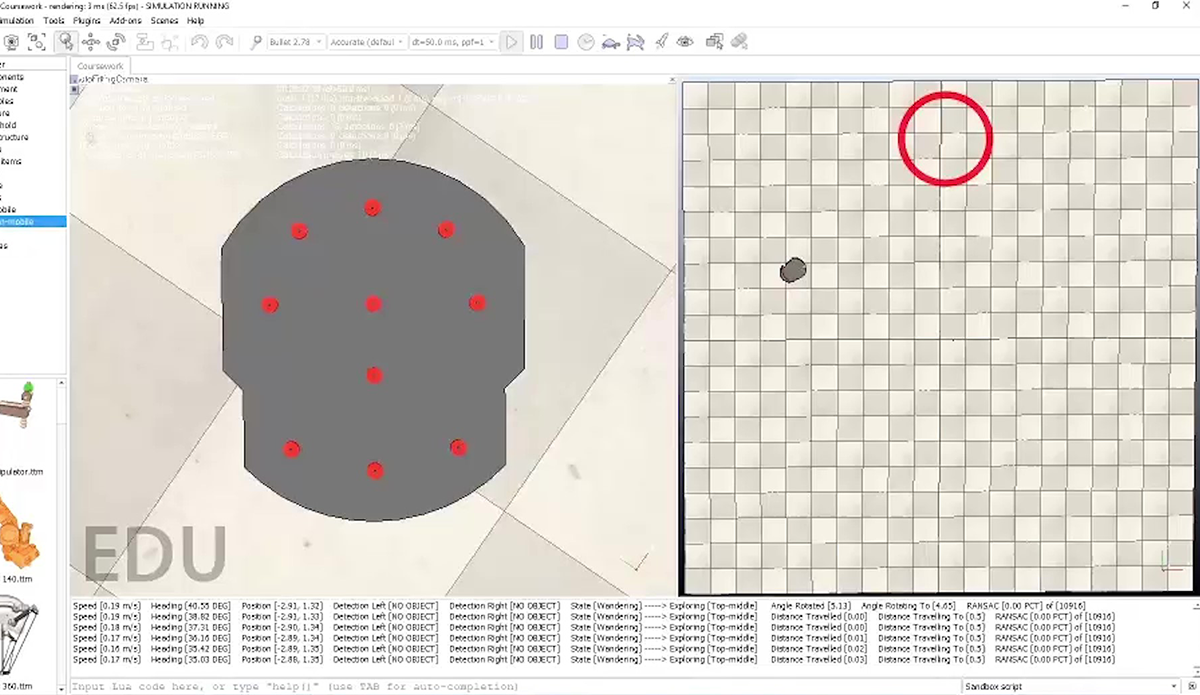
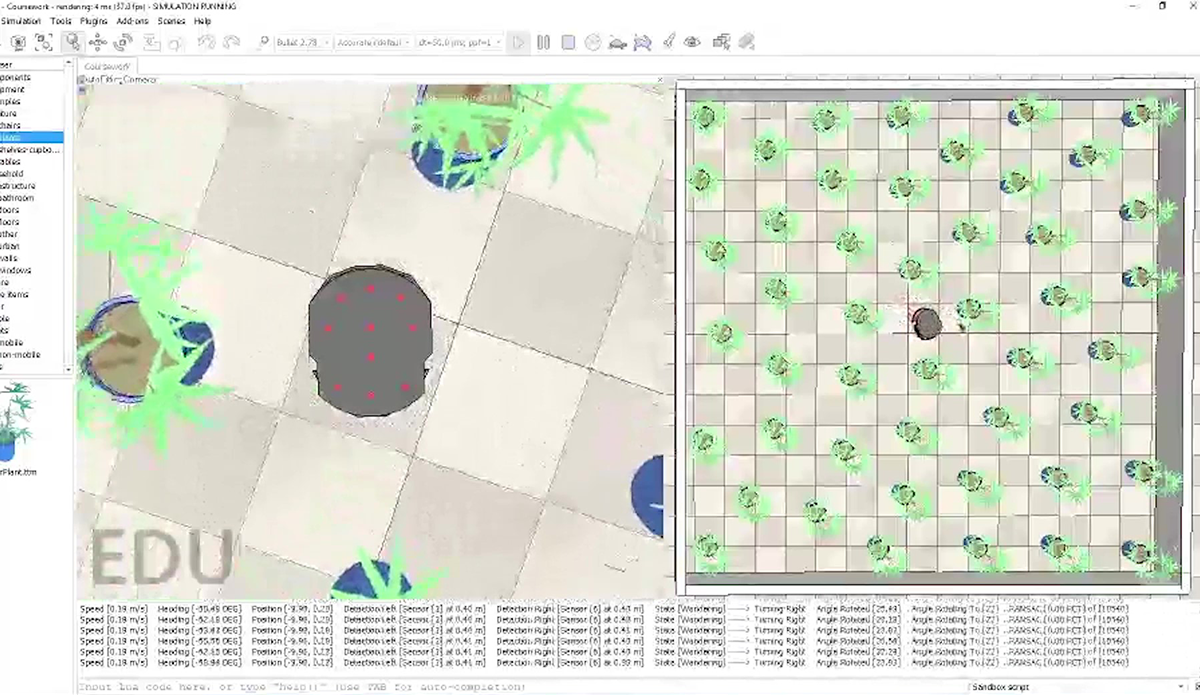
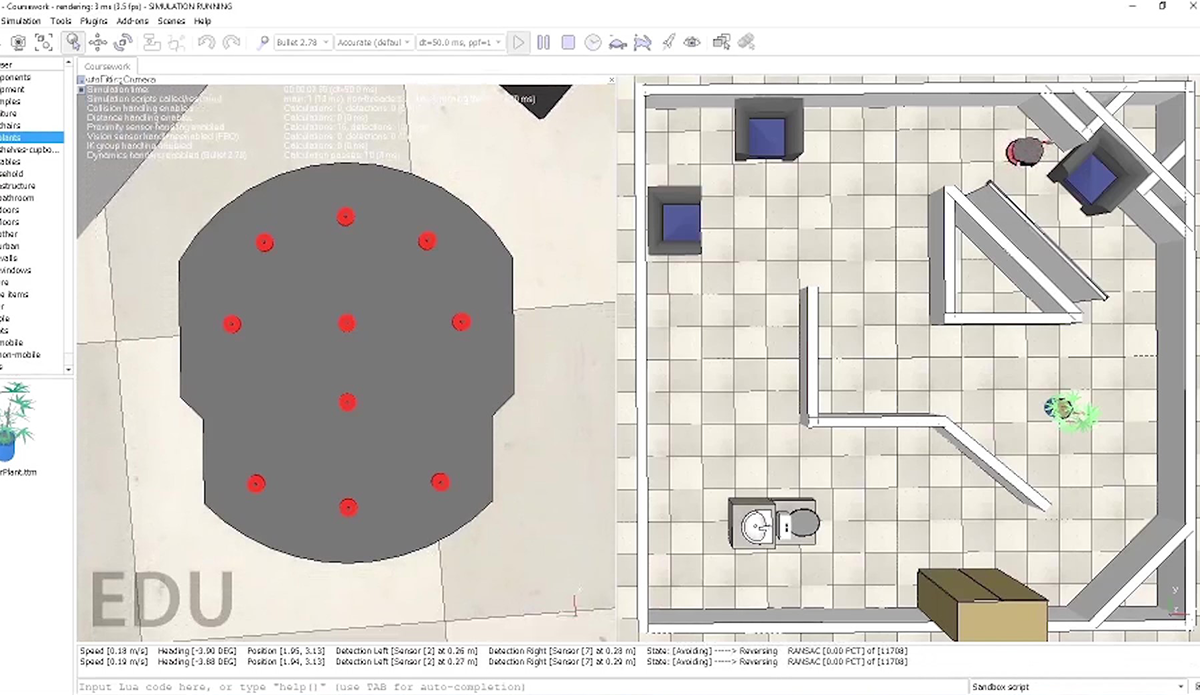
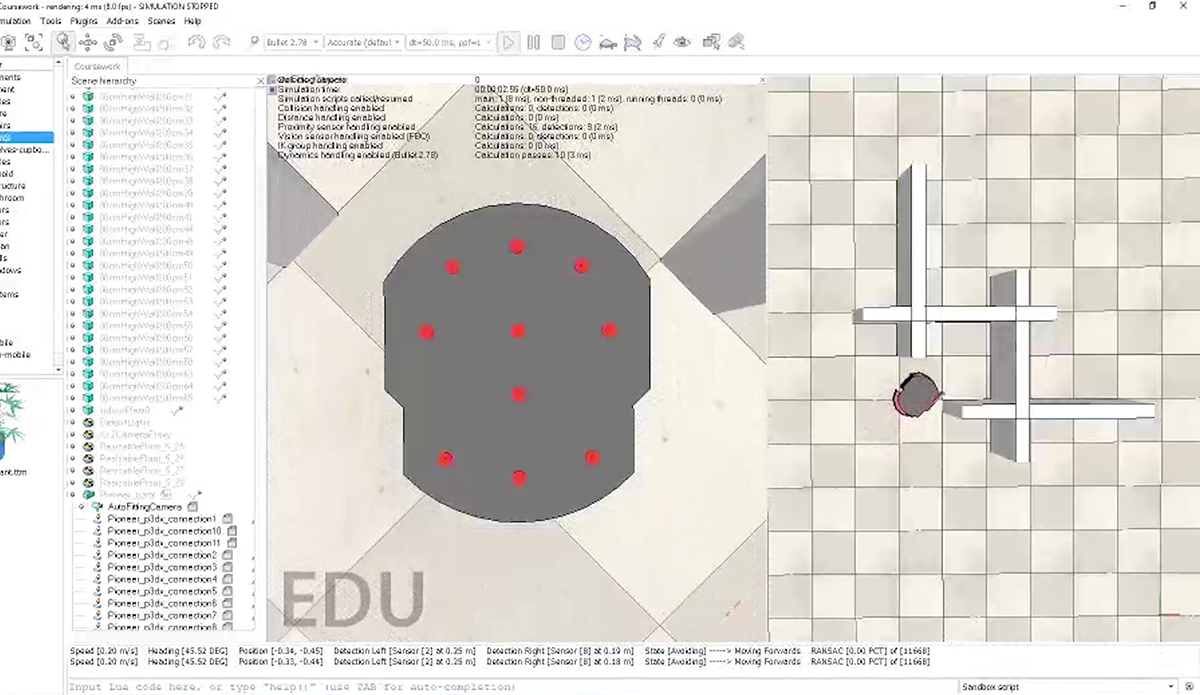
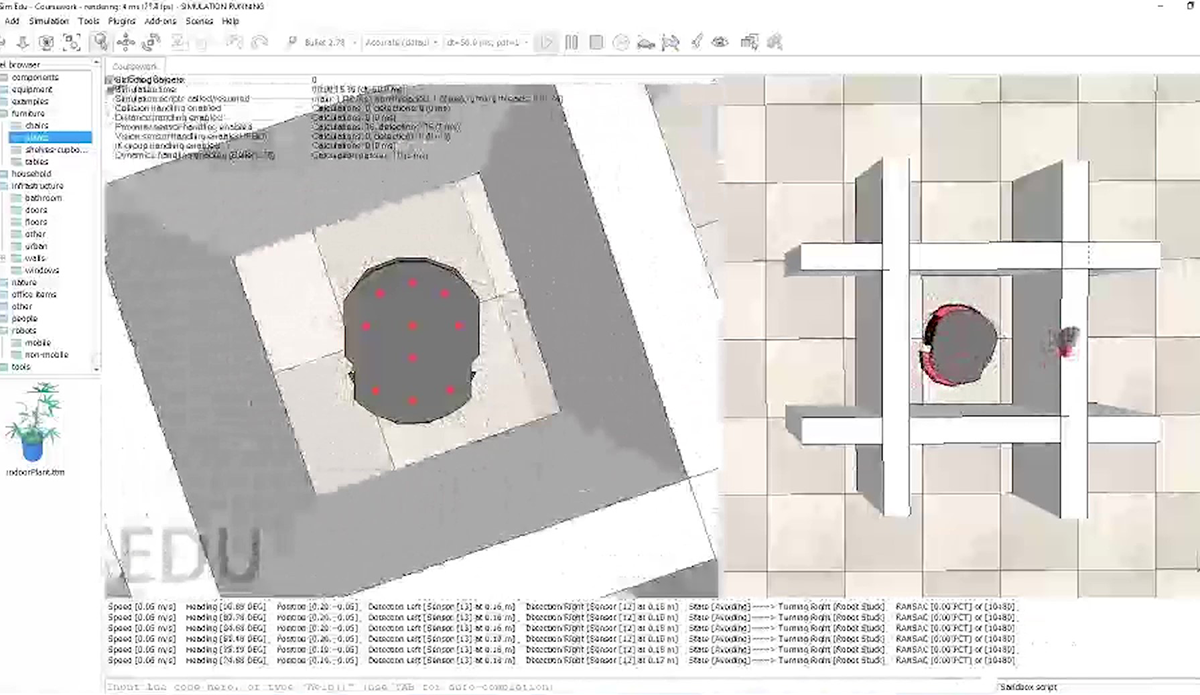
An autonomous robot controller for the Pioneer 3-DX mobile robot, designed to enable the model of robot to
solve a series of complex predefined tasks.
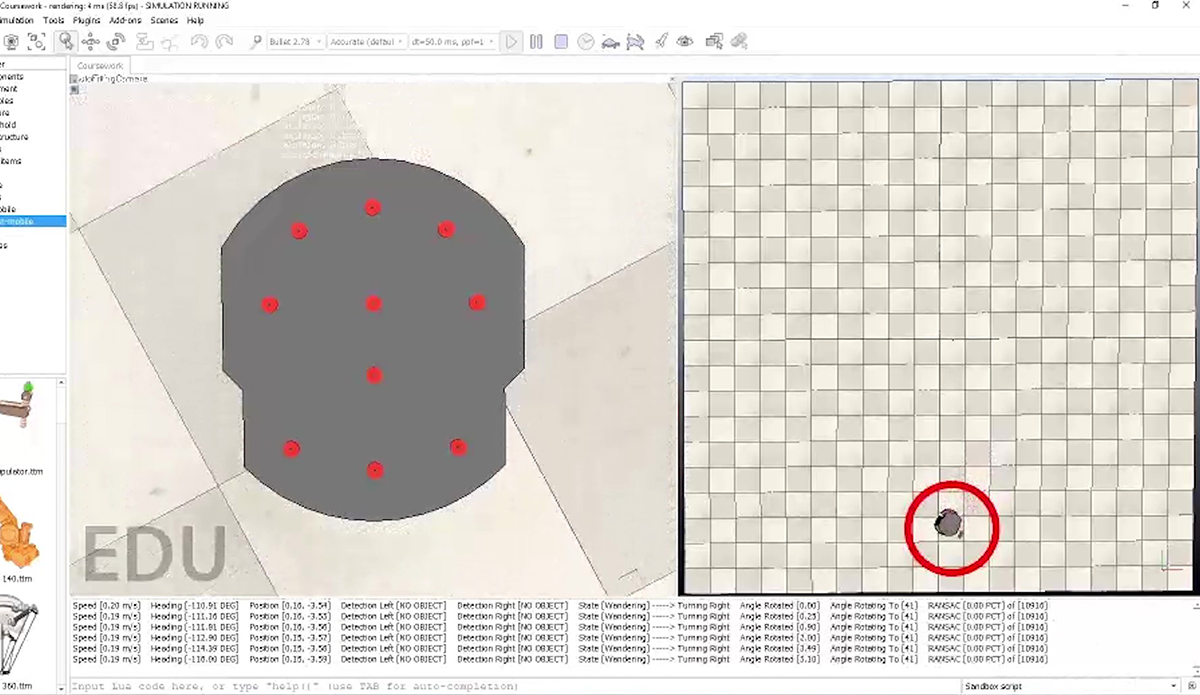
The controller allows the Pioneer 3-DX mobile robot to traverse through its environment, randomly, to
avoid obstacles, to follow the edges of obstacles, and to progressively map it's environment, autonomously.