Project Specification
- Project Type: Academic
- Project Mode: Independent
- Project Status: Complete
- Project Duration: 1 Month
- Project Involvement
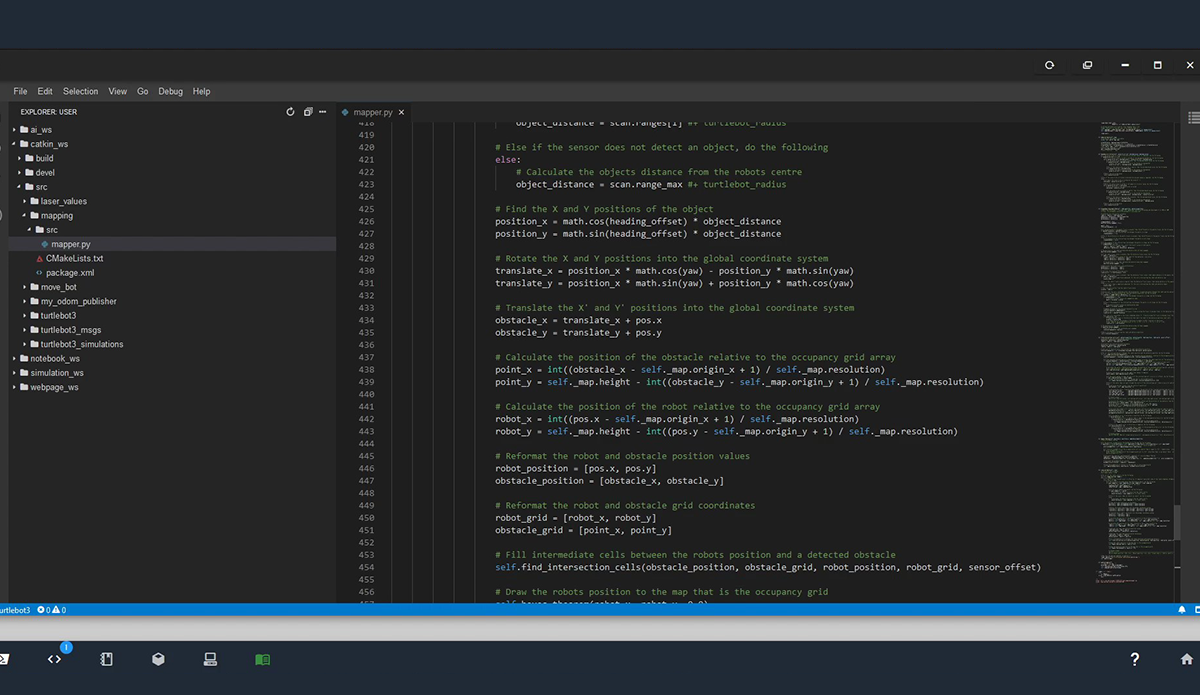
- Developed the robot controller
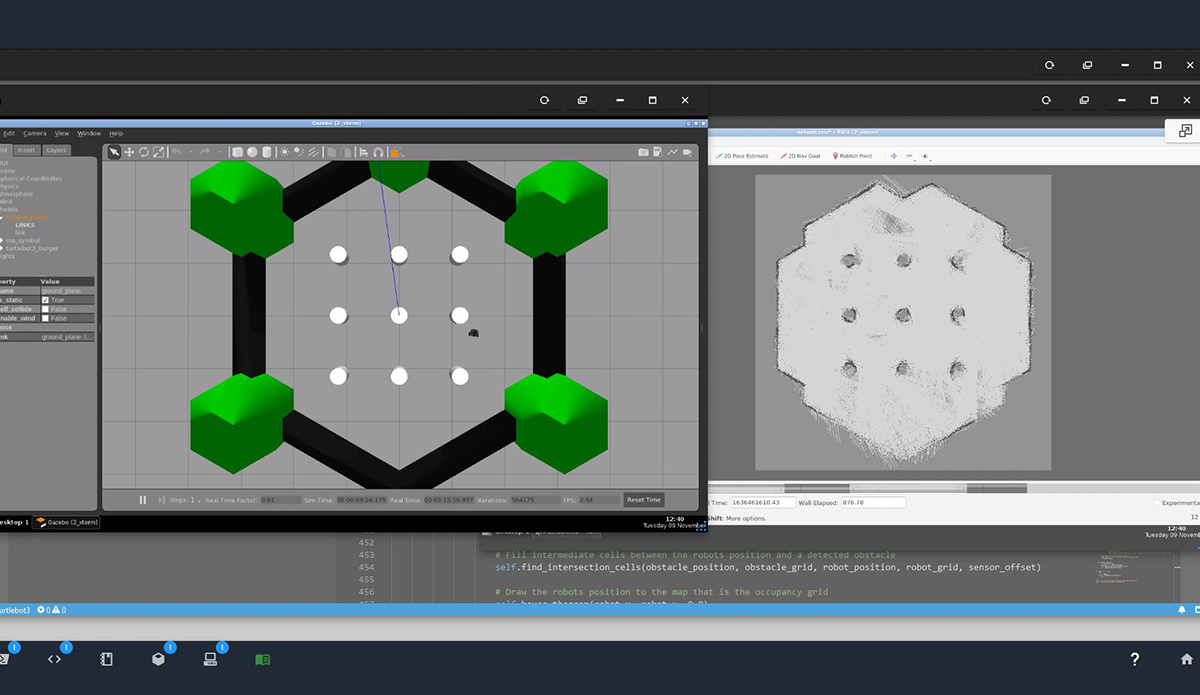
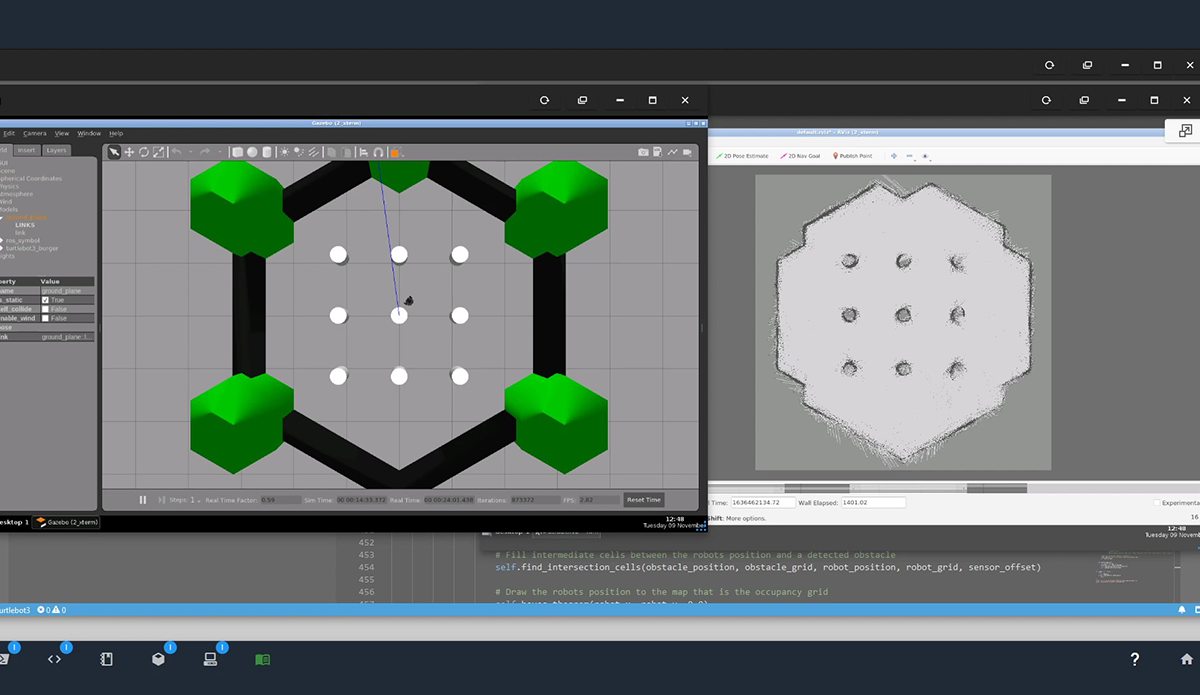
- Implemented environment charting
- Engineered edge following behaviours
- Developed random traversal behaviours
- Integrated obstacle avoidance behaviours
- Implemented recursive Bayesian inference
- Software Applications
- The Construct
- Supported Platforms
- Windows
- Download: Google Drive
- Documentation: .pdf .docx
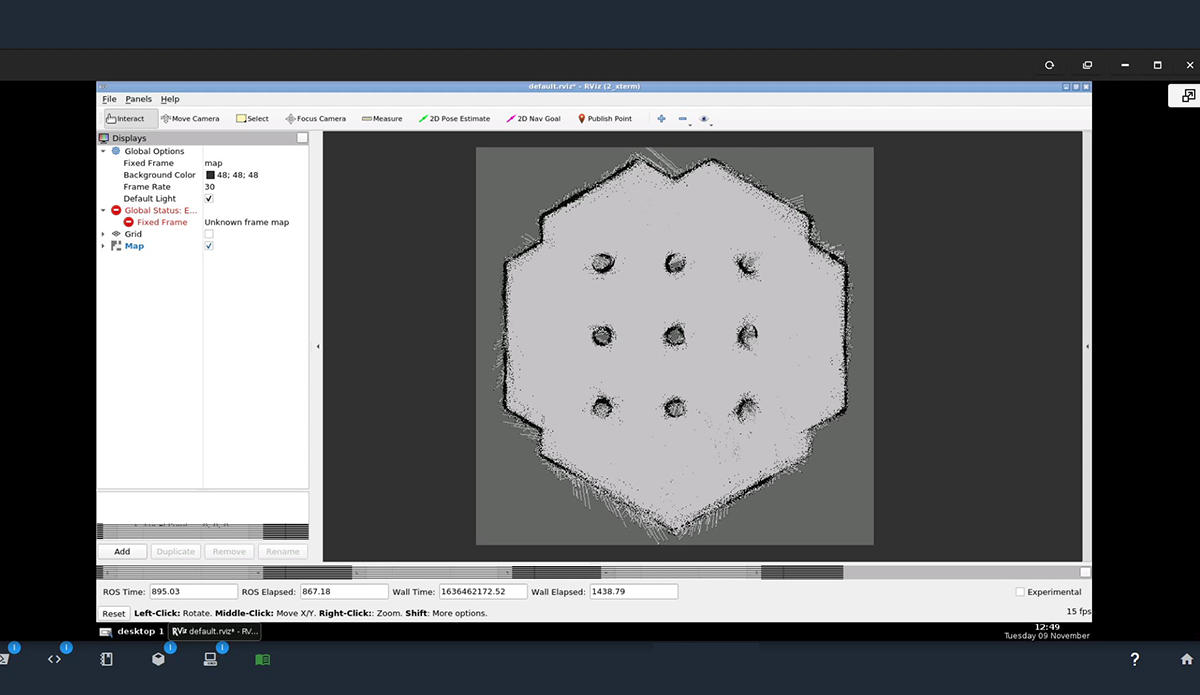
Synopsis
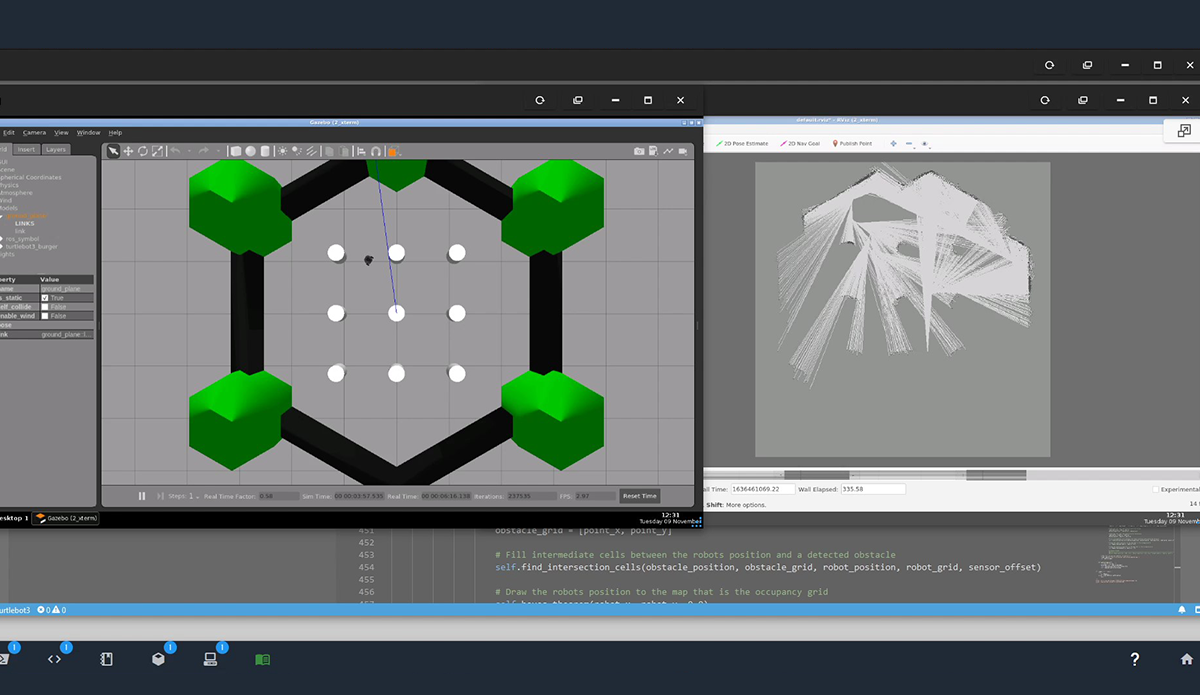
An autonomous robot controller for the TurtleBot3 mobile robot, designed to enable the model of robot to
traverse randomly, avoid obstacles, and chart its environment simultaneously.
The controller allows the TurtleBot3 mobile robot to traverse through its environment, randomly, to
avoid obstacles, and to progressively map it's environment to a two-dimensional plane, autonomously.