Project Specification
- Project Type: Academic
- Project Mode: Independent
- Project Status: Complete
- Project Duration: 1 Month
- Project Involvement
- Developed the robot controller
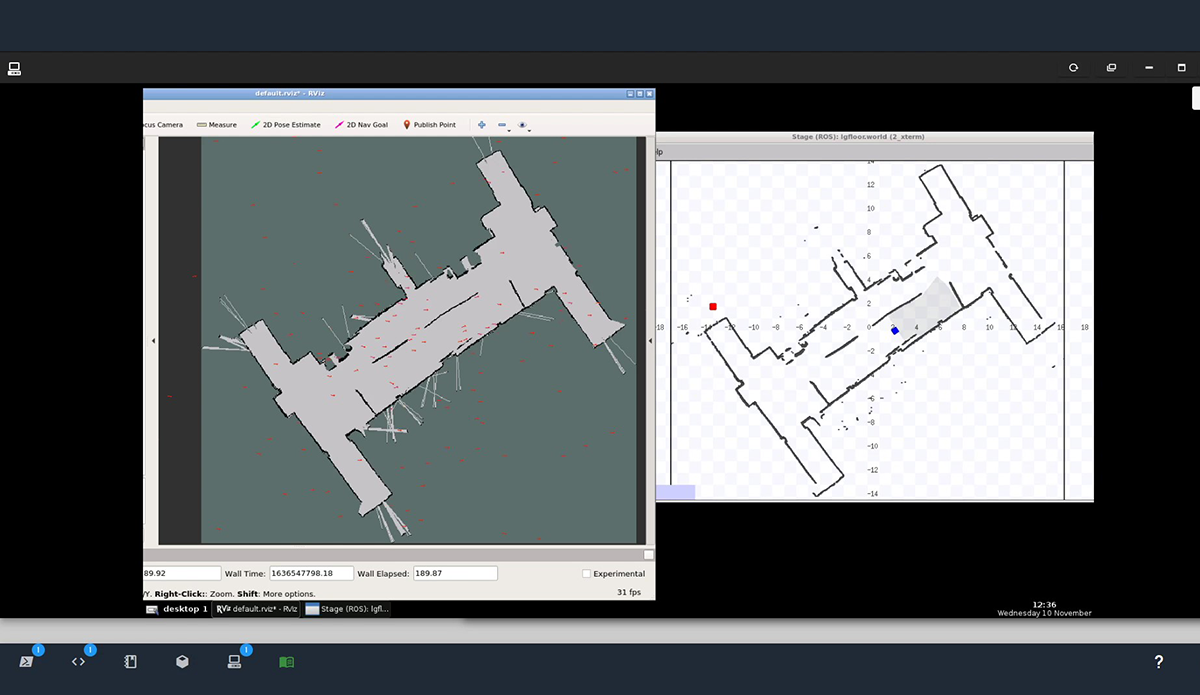
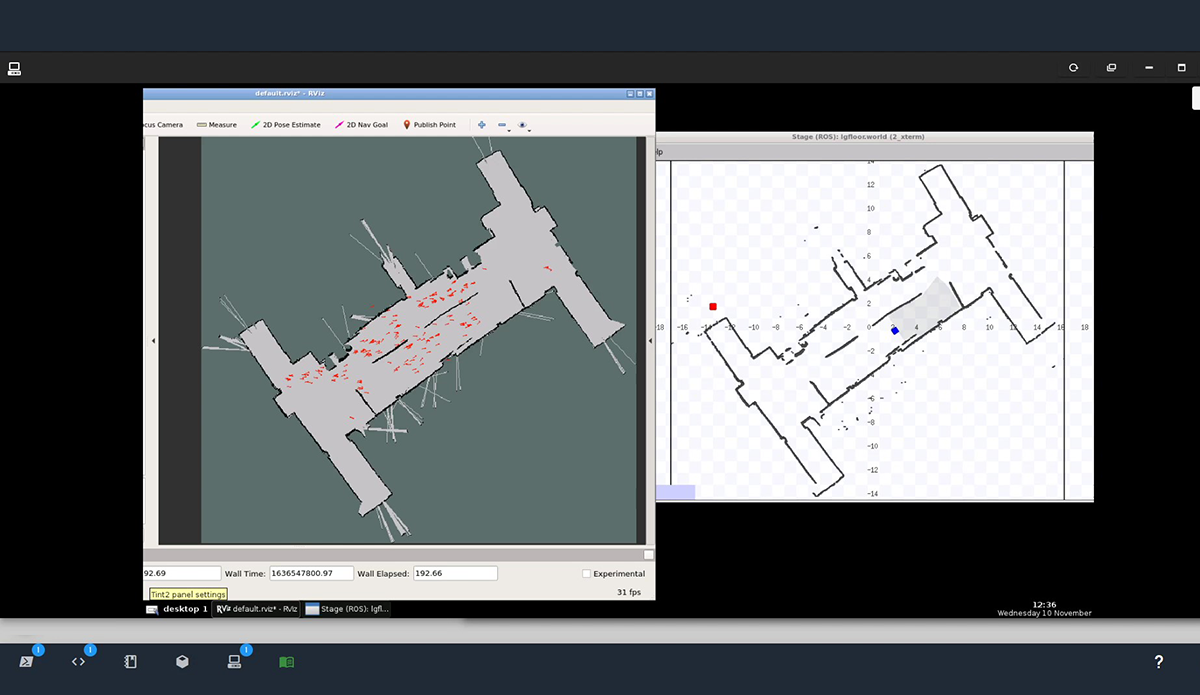
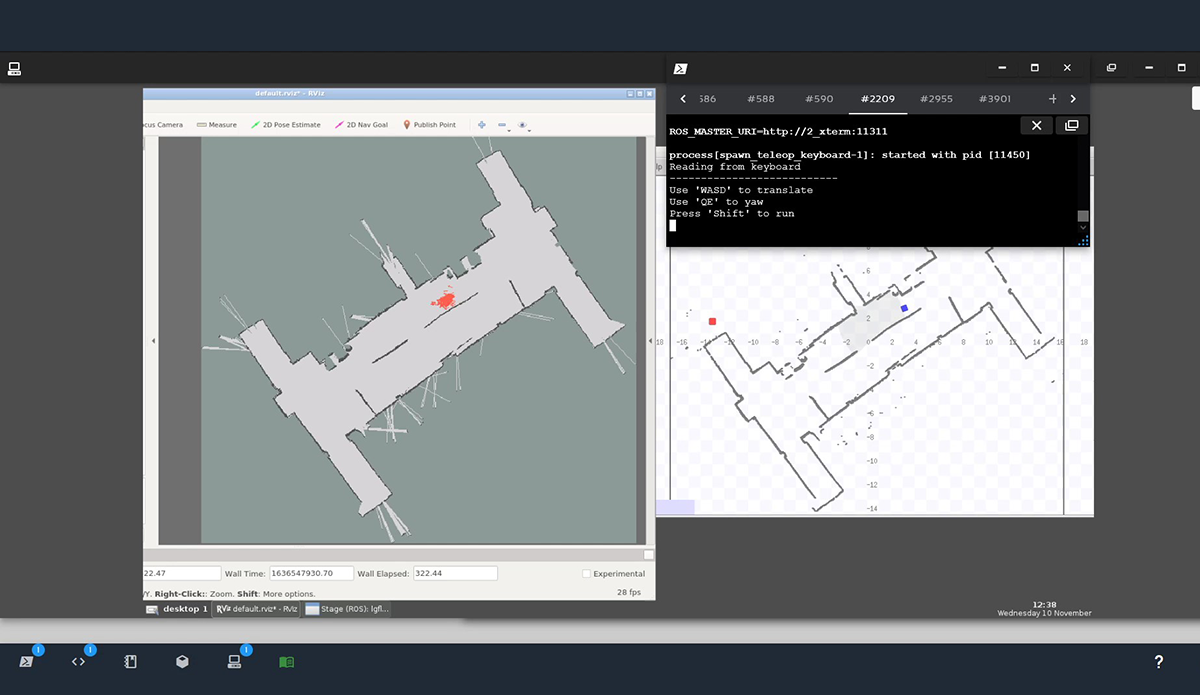
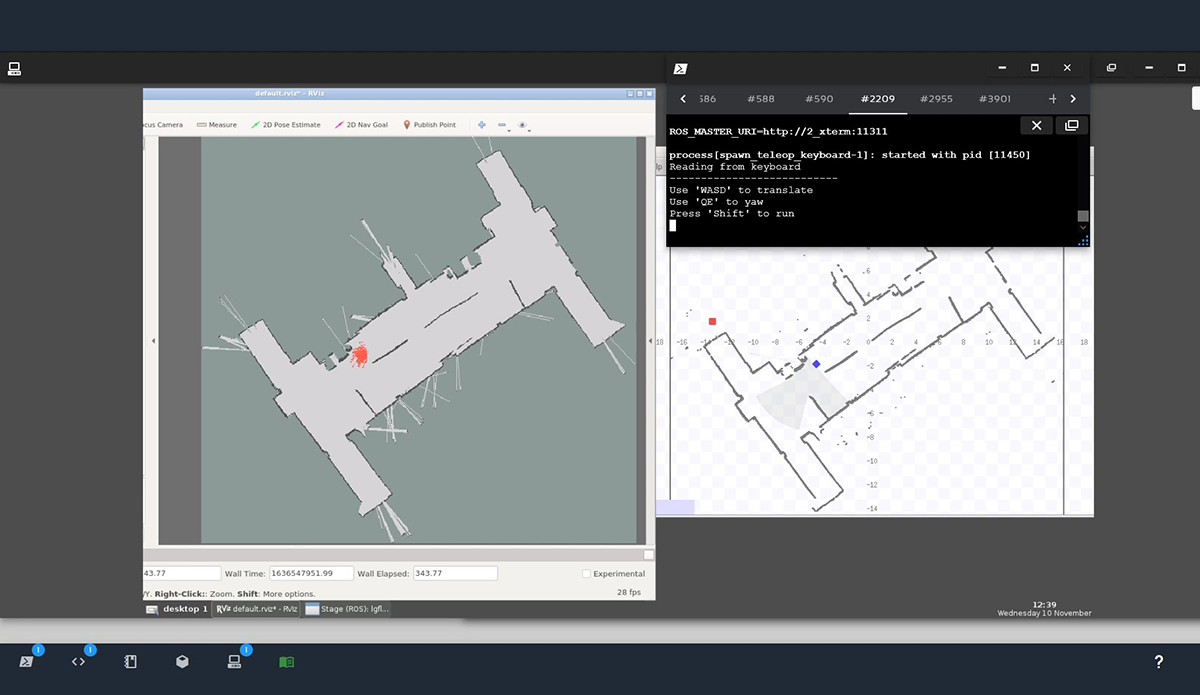
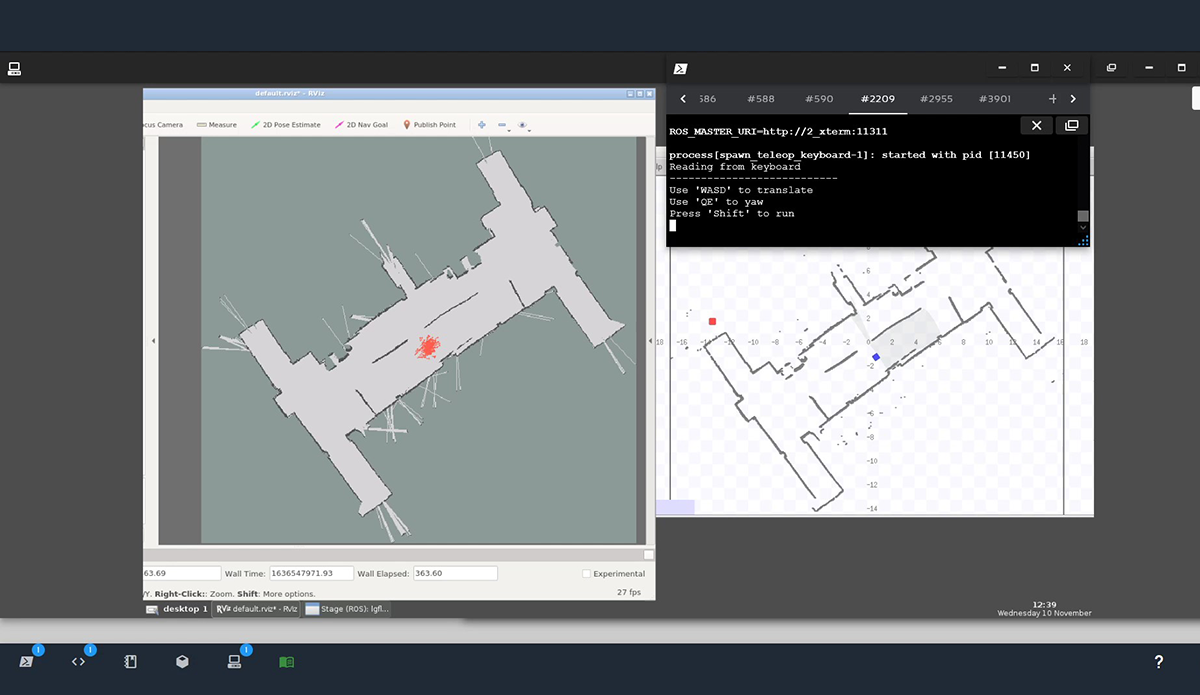
- Implemented Monte Carlo localisation
- Software Applications
- The Construct
- Supported Platforms
- Windows
- Download: Google Drive
- Documentation: .pdf .docx
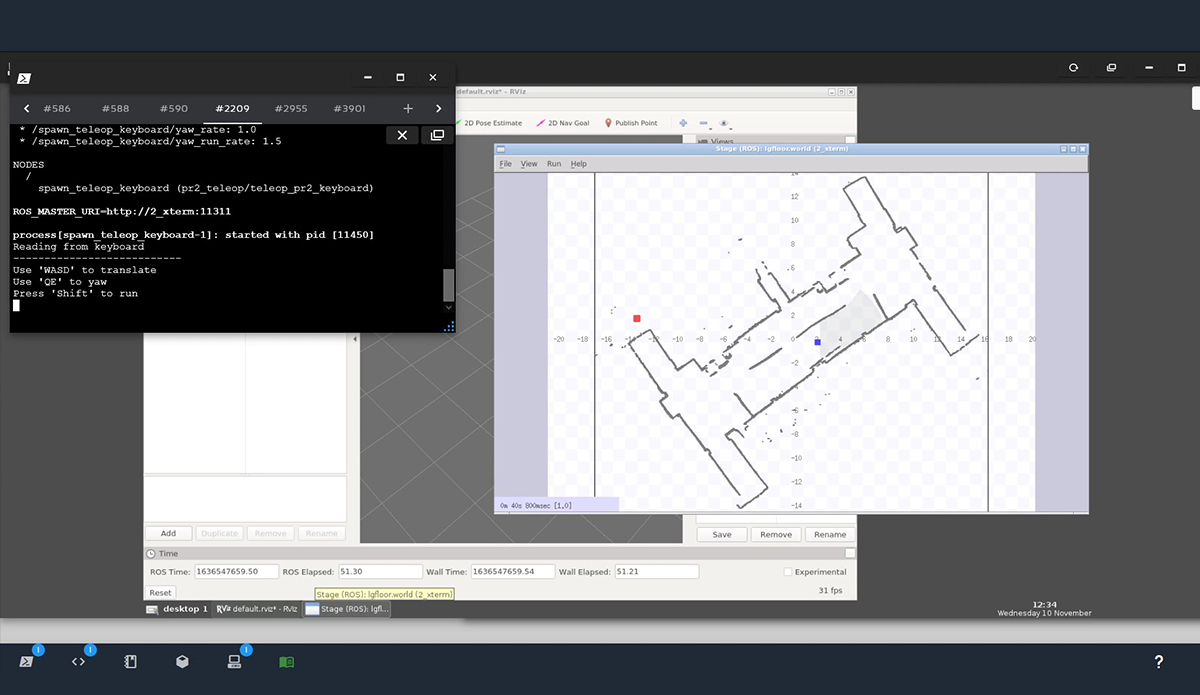
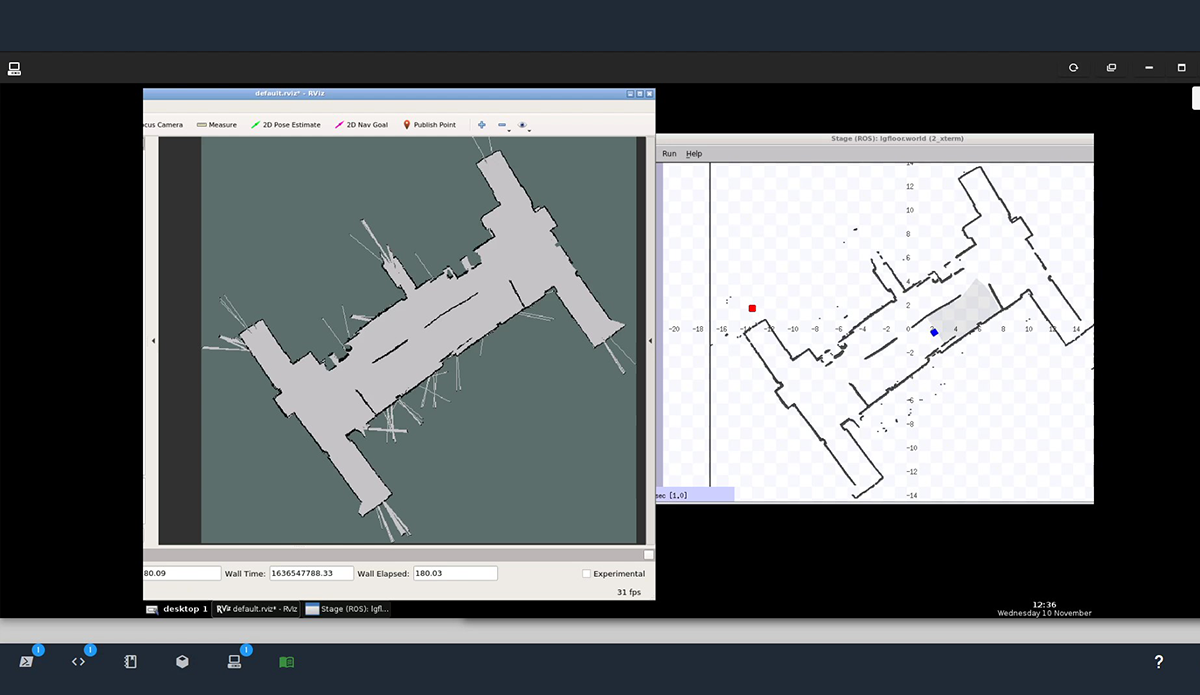
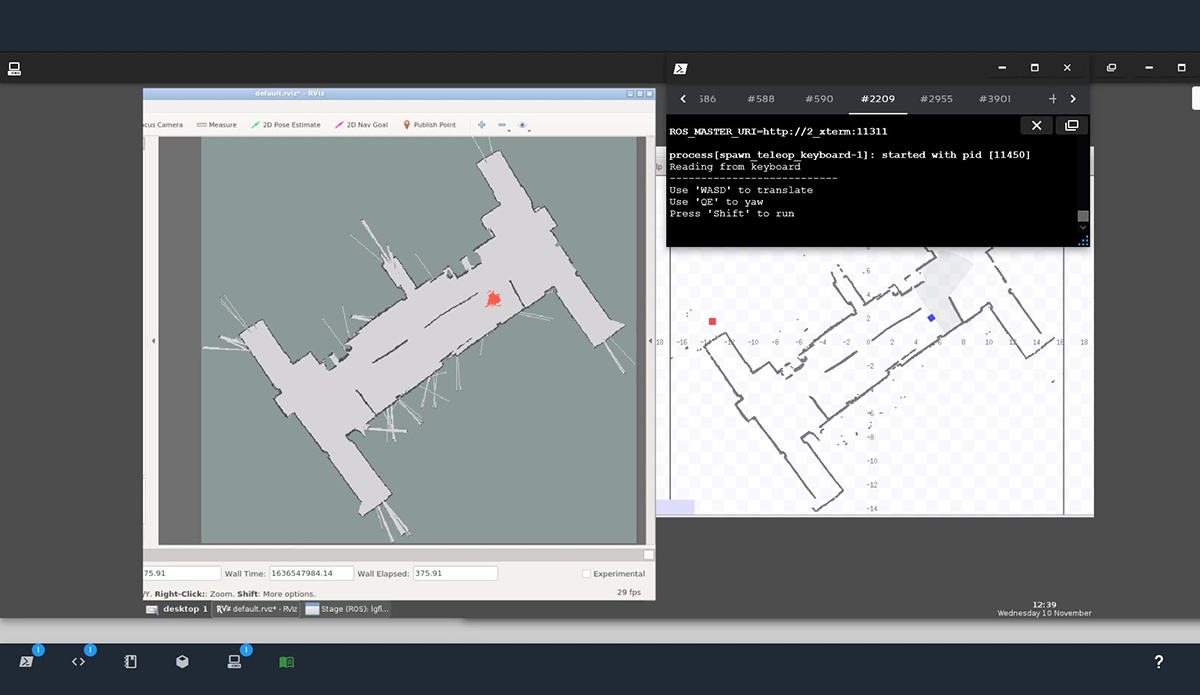
Synopsis
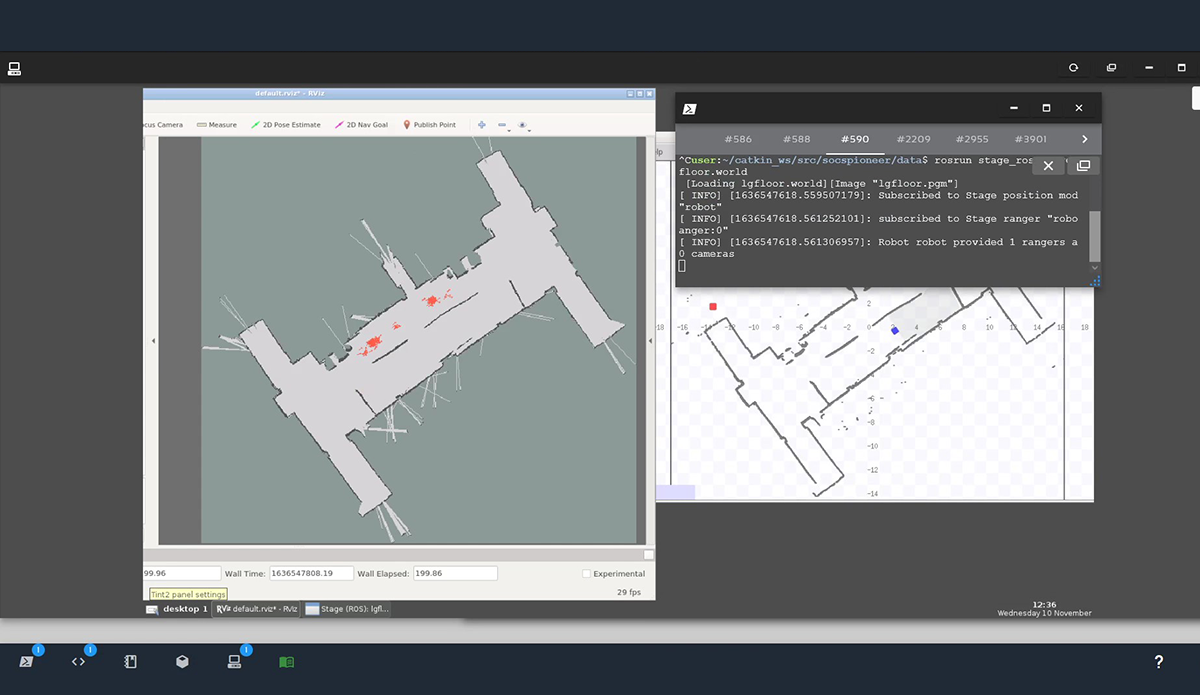
An autonomous robot controller for the Pioneer 3-DX mobile robot, designed to enable the model of robot to
localise itself within a known environment.
The controller allows the Pioneer 3-DX mobile robot to localise itself within a given, known environment, via
a probabilistic localisation technique, namely Monte Carlo localisation.